|
VieSched++
VieVS VLBI Scheduling Software
|
|
VieSched++
VieVS VLBI Scheduling Software
|
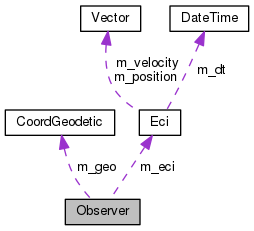
Stores an observers location in Eci coordinates. More...
#include <Observer.h>
Public Member Functions | |
| Observer (const double latitude, const double longitude, const double altitude) | |
| Observer (const CoordGeodetic &geo) | |
| void | SetLocation (const CoordGeodetic &geo) |
| CoordGeodetic | GetLocation () const |
| CoordTopocentric | GetLookAngle (const Eci &eci) |
Private Member Functions | |
| void | Update (const DateTime &dt) |
Private Attributes | |
| CoordGeodetic | m_geo |
| Eci | m_eci |
Stores an observers location in Eci coordinates.
|
inline |
Constructor
| [in] | latitude | observers latitude in degrees |
| [in] | longitude | observers longitude in degrees |
| [in] | altitude | observers altitude in kilometers |
|
inline |
Constructor
| [in] | geo | the observers position |
|
inline |
Get the observers location

| CoordTopocentric Observer::GetLookAngle | ( | const Eci & | eci | ) |
Get the look angle for the observers position to the object
| [in] | eci | the object to find the look angle to |

|
inline |
Set the observers location
| [in] | geo | the observers position |

|
inlineprivate |
| [in] | dt | the date to update the observers position for |

|
private |
the observers position
 1.8.11
1.8.11 
